
制造业务
来源:制造业务 | 发布时间:2024-08-30 11:37:19 | 点击率: 16次
军舰远航,离不开舵。作为舰船上特有的装置,舵的性能直接影响到舰船的安全机动。舵手,则直接掌控着整条船的前进方向。在舰船航行中,舰长往往和舵手待在一起甚至亲自操舵,以便随时调整船的航线。
汽车驾驶中,有个借用开船的说法:驾驶员靠左的方式叫“左舵”,驾驶员靠右的方式则称为“右舵”。那么,舵到底是什么,是船的方向盘吗?请看本期解读。

舵其实是控制方向的一整套设备,除了常见的舵轮(就是舵手握着的那个像方向盘的东西),还有舵机,以及船尾的片状“舵叶”。这些全部加起来才能控制船的方向。
最早的船舵,是由船桨发展而来的。古代,人们用桨在船的一边划动来让船前进。当两侧的桨力不对称时,船会转向,于是人们也学会了用桨来改变航向。
后来,桨的推进和操作航向这两种功能逐渐分离:人们在船尾设置了专门的桨来控制方向,并扩大了桨叶面积;除了位置改变,操作也从原来的划动变成不离开水面的左右摆动。就这样,桨逐步变成了舵。
早期的舵是斜伸出船尾的,在船后凸出较多。但这样的尾舵桨也存在一些缺陷,比如遇到浅滩或靠岸时不易操纵。后来,人们又发明了升降舵,能够准确的通过水深调整舵的高低。当船靠岸或驶入浅滩时,可以把舵吊起来,避免被折断;不需要改变航向时,也可以把舵升起来,以减少阻力、提高速度;遇到风浪时,把舵降到最低处,能够大大减少船体摇晃、降低船随风漂泊的可能性,行驶会更安全。
到了18世纪,人们发明了舵轮,也就是那个看起来像方向盘的装置。通过这一个“方向盘”带动滑轮来操作后面的舵,就比以前省力多了,而且方向盘位置在甲板上的前方,也方便观察海面的情况。
舵轮要带动链条,把力传导至船尾的舵叶,仍然需要人力。为了更省力,舵轮最开始都做得很大。因为中心半径大,力矩就大,用力就小。不过,即便这样,通常数小时定期换班的操舵,也让水手们累得够呛。
随着技术发展,物理运动变成了液压传动,操作舵轮才变得不再费力。目前的驾驶台都是电脑控制的电子传动同步电讯号,舵轮能做到比方向盘还小。舵手只用手指拨动,舵轮就转到需要的角度了。而且在宽阔平稳的海面还能轻松实现无人驾驶,这大幅度的降低了航行的难度。
“中国环监001”号船驾驶台,驾驶台中间就是比汽车方向盘还小的舵轮。图片由作者提供
首先要说一下,虽然随着桨的两种功能分离,慢慢变成调整方向的舵和负责推进的螺旋桨,但它们往往需要联合在一起发挥作用。
螺旋桨作为推进器,本身也有一些改变方向的功能。比如,直叶推进和喷水推进;还有可调螺距螺旋桨,能通过调节螺距来改变航向和航速;甚至有一种可以360°旋转的吊舱桨,能实现舵和桨的合二为一,根据航行需要来调整推进器的角度,以实现正航、倒航以及战术机动需求。
航行中操纵舵时,它两边的水流就会出现不对称。如果舵偏向右,那右边就是迎流面,左边就是背流面。水流过时,背流面(左边)的流程比迎流面(右边)的流程要长,速度也更快。流速快则意味着压力更低,这时候两边就会有压力差,这股压力差就会推动船体转动。
速度越快,舵越灵敏。静止时舵就比较笨拙了,没办法让船体转动。而且航行的时候,只要转舵,就等于增加了阻力,速度就会受一定的影响。所以,航海中有一个通则,就是尽量“少动舵、小动舵”。
话说回来,驾驶室中那个操纵舵的手柄看起来小小的,它到底怎么样影响并操纵万吨巨轮呢?
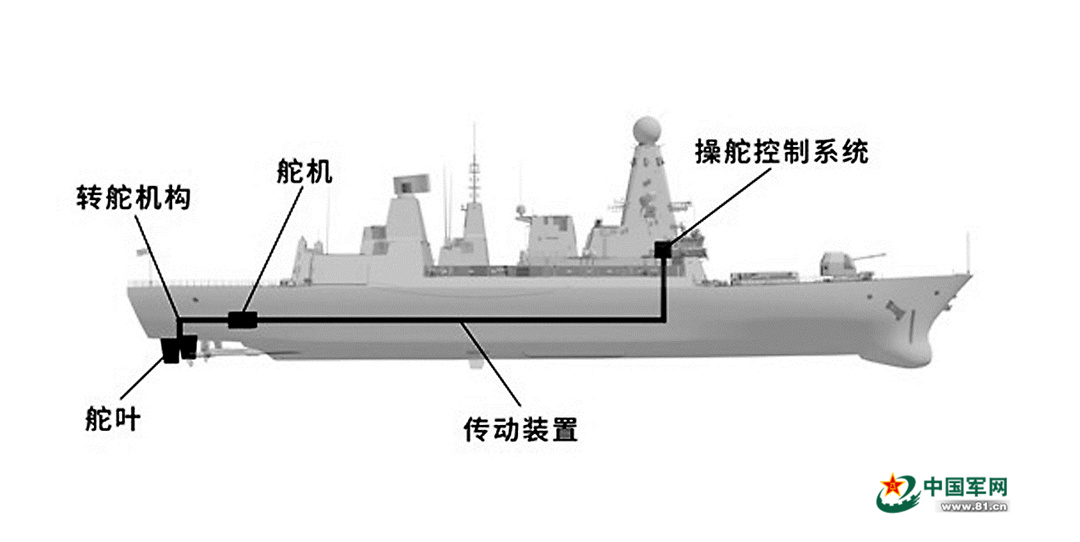
舵装置由舵叶、舵机、转舵机构、传动装置、操舵控制管理系统构成。这一整套装置一起工作,才能在规定时间内改变船舶的航向,并保证其正常航行。
其中,舵叶通常安装在船尾,使船转动;舵机及转舵机构一般安装在舵机舱内,舵机是动力来源,通过转舵机构将力矩传递给舵杆,从而带动舵叶进行转动;传动装置一般有机械式、液压式以及电动式,它传递操作系统的信号来驱动舵机;操舵控制管理系统则由舵手或船长操纵舵轮或手柄,对整个舵装置进行控制。
相对于大船来说,舵叶虽然是小小一片,但由于位于船尾,它与船的重心相距很远,形成的力矩是相当大的,可以很便捷地改变航向。
为了应对一些紧急状况(比如船舶主电源失效),船上还会设置备用或应急操舵装置,通常由蓄电池或应急发电机等应急电源供电。这样,在紧急状况下也能操纵船舶,临时控制航向,确保航行安全。另外,在满足使用上的要求的前提下,为减少和应对水流的力,要尽量减小舵各部分的外观尺寸和质量,提高舵的刚度和强度。
不仅水面上的船有舵,水下的潜艇上也有舵,而且舵的结构更复杂。因为潜艇不只是在水的某一水平面上运动,还要在垂直面内上浮或下潜,两种运动可能会一起进行,所以对舵的要求也更高:在航行中,潜艇不仅要保持、还要能迅速改变航向或深度。
为了控制垂直面内的运动,潜艇一般都装有两对升降舵:首升降舵和尾升降舵。同时,为增加航行稳定性,尾部还设有水平稳定翼。要操控潜艇在水平面内的运动,则要用到方向舵和垂直稳定翼。方向舵用来改变水平面内的运动方向;垂直稳定翼用于保持水平面内的航向稳定性。当方向舵和首尾升降舵成各种不同的舵角组合时,就能灵活地控制潜艇在水面和水下运动。
我们判断船好不好开,一般会用稳定性和回转性来衡量。稳定性就是船保持既定航向,做直线运动的能力;回转性是指船由直线航行进入曲线运动的能力——通俗一点说,就是船走得直不直,弯拐得顺不顺,能在多大范围内规避碰撞等。
为什么要首先强调船的“稳定性”?这是因为海上的不稳定因素太多了。外界干扰如风、浪、流等,都会让船偏离航向。其复杂程度,远非开车能比拟——开车的时候,默认状态就是直走,但船要保持直行向前,需要驾驶者不断地操舵。所以,操舵的频次、角度是衡量稳定性的重要标准。
稳定性好的船,操舵的频次相对更低,航迹也更接近直线。而稳定性不好的船,需要更高频次地纠正航向,航线也因此更曲折,实际的航行距离更长。通常,如果平均操舵频率不大于每分钟4~6次,平均转舵角不超过3°到5°,就可以认为船的航向稳定性是符合标准要求的。
同时,不断操作也增加了操纵装置和推进装置的功率消耗。由于操舵增加的功率消耗,一般占主机功率的2%~3%。而稳定性不好的船,此处增加的功耗可能高达20%。
第二个衡量标准“回转性”,则与船的避让、靠离码头、灵活掉头等紧密关联。船的回转性好不好,要看“定常回转直径”。这个指标很重要,甚至曾是衡量船舶回转性的唯一指标。
船进入到定常阶段后的回转圈的直径,称为定常回转直径。满舵条件下的定常回转直径称为最小回转直径,定常回转直径与船长的比值称为相对回转直径。
怎么判断回转性好不好呢?能够准确的通过最小相对回转直径来判断。“5”是个分界线。对于回转性极佳的小型快艇,这个值只有“3”;而船型细长、掉头困难的驱逐舰则可能达到“10”。事实上,大部分船的值都在“5~7”之间。
回转可不只是“掉个头再转一圈”那么简单。回转时,船的速度会降低。在小舵角回转时,航速变化不大;但在满舵回转时,因为阻力增大,大大消耗了螺旋桨的推力,船速甚至会减小到回转初速的40%左右。对于军舰来说,回转性灵活与否,直接决定着其战斗力的高低,特别是在近距离海战的情况下。
在回转时,船还会出现横倾。这是由于船体水动力、舵力、离心力等不是作用在同一高度而造成的。就像大客车转弯过快时会翻一样,如果横倾角过大,甚至会造成船舶倾覆。所以,回转时转舵的速度,必然的联系到船的安全。船在海上遇到困难需要变向、掉头,或在靠离码头时要灵活转身,都是在这个看似简单的动作基础上来做的,这也是回转性这么重要的另一个原因。
值得注意的是,船的稳定性和回转性还会互相制约,所以在舰船设计时,应根据其用途和航行区域对操纵性的要求做出不同的选择。比如,对于近岸航行及反水雷舰艇,由于航向变动频繁,对回转性要求更高;而设计驱护舰时,则需要考虑到它常常以较高的航速保持直航,因此对稳定性要求更高。